聯系我們
- 上海耐創測試技術有限公司
- 聯系人:陳工
- 電話:021-39197548
- 郵箱:zhujing@forcechina.com?
- 地址:上海市嘉定區馬陸鎮寶安公路2999弄東方慧谷26號

BOTA六維力傳感器—機器人拖動示教
目前,人機協作概念炒的火熱,機器人示教技術作為工業機器人繼續發展與創新的一個重要方面,示教技術正在向利于快速示教編程和增強人機協作能力的方向發展。實際應用最多的傳統的示教盒示教要求操作者具有一定的機器人技術知識和經驗,示教效率較低。與示教盒示教相比,拖動示教法可以無需操作者掌握任何機器人知識及經驗,操作簡單且快速,極大地提高了示教的友好性、高效性。
各大機器人廠商紛紛推出自己的協作型機器人,雖然各種協作型機器人的技術參差不齊,但拖動示教功能逐漸成為協作型機器人的標配,似乎沒有拖動示教功能的機器人都不好意思稱為協作型機器人。許多研究者紛紛對拖動示教產生了極大熱情,在進行成果展示時,能夠徒手牽著機械臂到處走似乎非常拉風。
1、拖動示教
是指在操作者的牽引下(牽引末端或者牽引某一個操作臂),操作臂會沿著人的作用力方向移動。這一功能可以很方便地進行規劃軌跡(對過程軌跡精度不高的任務),以便操作者記錄和復現軌跡,而無需人工編程,降低了對操作者的門檻,提高了效率。
2.基于六維力傳感器的拖動示教(導納方法)

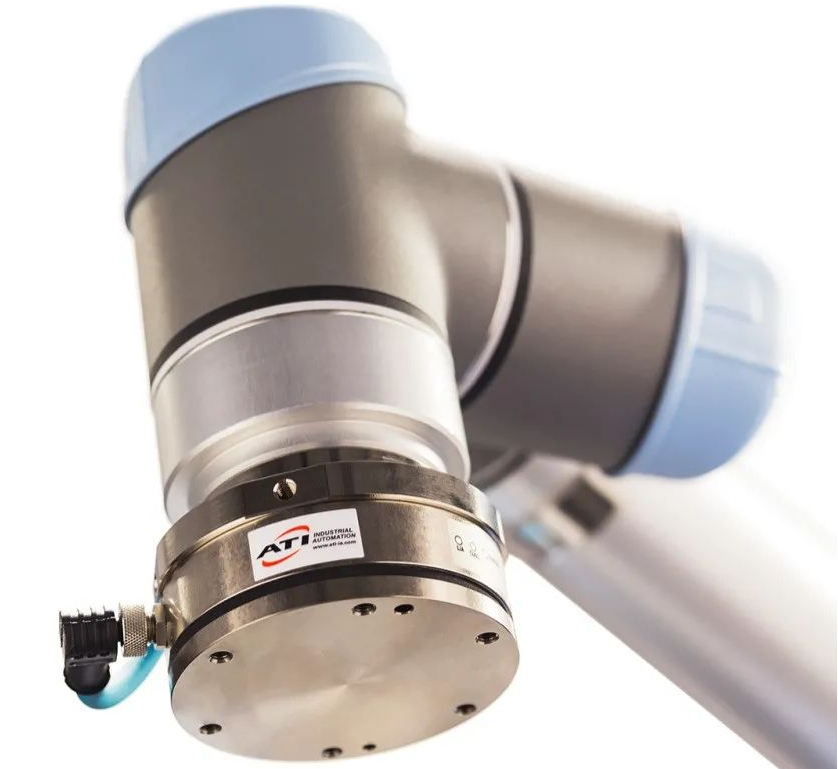
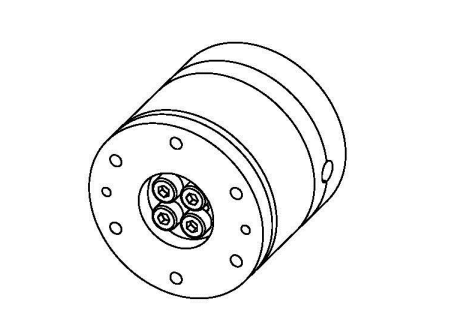
BOTA六維力傳感器
拖動示教:示教是根據當前位置和速度進行重力矩和摩擦力矩補償,然后操作臂沿著人施加力的方向運動。拖動示教的重點不在于示教,而在于“拖”。如何能夠使人輕柔而灑脫地牽著機械臂呢?最容易的辦法就是使用六維力傳感器,把這種傳感器裝在機械臂末端,就可以把機械臂末端受力進行實時反饋。那么如何用六維力傳感傳感器實現拖動示教呢?只要一個公式:Δx=K?F
F 表示六維力傳感器采集的力信號, Δx 表示位置的增量, K 是自己設定的系數, K 越大,手感越“輕”。將末端受到的力變成位置的增量,作為控制量按周期下發,就可以實現拖動示教,什么機器人動力學模型、重力補償統統不需要。由于傳感器外置與機械臂末端,因此,這種方法的另一個好處是不需要對力傳感器在機構設計上做過多的考量,包括傳統的工業機器人在內的所有機械臂都可以用這種方法實現拖動示教.









 滬公網安備 31011402003414號
滬公網安備 31011402003414號